Prozessautomatisierung ist heute ohne das flexible Greifen und Handhaben von Teilen durch Roboter kaum noch denkbar. Auch Harro Höfliger setzt seit Jahren vermehrt solche Systeme in seinen Anlagen ein. „Roboter führen nicht nur zu einer effizienteren Auslastung und zu flexibleren Prozessen, in der Regel sorgen sie auch für geringere Kosten“, erklärt Andreas Mahr, Department Leader Robotic. Seit Herbst 2018 kümmert sich eine eigene, interdisziplinär besetzte Robotic-Abteilung um die Projektierung, Durchführung und Betreuung von Roboteranwendungen.
Auch Vorversuche bei den Engineering & Innovation Services (EIS) und eine enge Verzahnung mit der mechanischen Konstruktion gehören standardmäßig zum Prozess. Kunden profitieren von dieser Inhouse-Kompetenz und schätzen es, einen einzigen Ansprech- und Servicepartner für die Robotertechnik in ihrer Anlage zu haben.

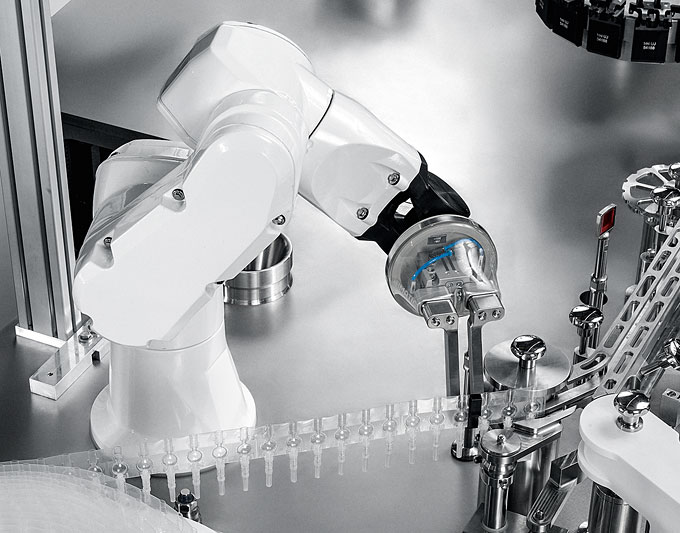
Die Roboterapplikationen bei Harro Höfliger sind in der Regel auf Pick & Place-Anwendungen spezialisiert.

Durch den interdisziplinären und mechatronischen Ansatz verfügt das achtköpfige Robotic-Team über viele Schnittstellen zu anderen Abteilungen. Wichtige Abstimmungen mit der mechanischen Konstruktion erfolgen bereits in der frühen Konzeptphase einer Maschine.
Vielseitiges Aufgabenspektrum
Bereits in einem frühen Stadium führt das achtköpfige Team Risikobewertungen durch. „Wir sind ab der Konzeptphase beim Projekt dabei. Von Anfang an steht die Prozess- und Maschinensicherheit über allem“, betont Mahr. Das Team legt dabei nicht nur die Anordnung der Roboterstationen fest, sondern auch den Abstand zur Schutzumhausung.
Die Auswahl des optimalen Robotersystems erfolgt auf Basis von Parametern wie Reichweite, Traglast und Umgebung. Im nächsten Schritt integriert die Gruppe die CAD-Umgebung in die Hersteller-Software und prüft die Software gegenüber den Systemanforderungen – dies betrifft in erster Linie die Taktzeit. Vor der finalen Inbetriebnahme der Roboter findet ein enger Austausch mit der Steuerungstechnik zur Programmierung der Maschinensteuerung (SPS) statt, um die Roboterapplikation in die Maschinenumgebung einzubetten.
Bei komplexeren Prozessabläufen kann mitunter auch eine virtuelle Inbetriebnahme erfolgen. So kann der Verbund aus Maschinen- und Robotersteuerung im Vorfeld ausreichend validiert werden; auftretende Probleme werden rechtzeitig erkannt und gelöst.
„Roboter führen zu einer effizienteren Auslastung und zu flexibleren Prozessen.“Andreas Mahr, Department Leader Robotic bei Harro Höfliger
Bezüglich der Technologie hat sich die Gruppe auf drei Kinematiken fokussiert: Zum einen auf SCARA-Roboter, deren Aufbau aus vier Achsen besteht. Eine zweite Variante ist der Delta Picker: Dies sind besonders leichte Parallelarmroboter mit mindestens drei Armen. Der an der Decke montierte Arm realisiert X-, Y- und Z-Verfahrwege und wurde für den Einsatz in Highspeed-Anwendungen konzipiert. Vertikale Teile lassen sich dagegen aufgrund seiner Freiheitsgrade nur mit einem 6-Achser greifen – diese dritte Variante kommt häufig bei Ovalläufern zum Einsatz. „Grundsätzlich enthält jedes Robotik-Automatisierungsprojekt kundenspezifische Entwicklungen, die in der Regel das Greifen und Handhaben von Teilen betreffen, sogenannte Pick & Place-Anwendungen“, erklärt Mahr.
Größtmögliche Anwendungsvielfalt
In den Anlagen von Harro Höfliger sind überwiegend filigrane Roboter integriert, abgestimmt auf das Handling kleiner und leichter Produkte wie Spritzen, Pens oder Wundauflagen. Vor allem für den Einsatz in aseptischen Produktionsumgebungen mit ihren hohen Anforderungen an steriles Handling sind Roboter die erste Wahl. Neben Pick & Place-Anwendungen können sie teils aber auch ganz spezielle Prozessaufgaben übernehmen: Etwa das Aufschneiden von Beuteln, das Auftragen von Klebern, das Entleeren von Transportbehältern oder das Aufrichten von Karton-Faltschachteln.
„In Zukunft wollen wir die Roboteranwendungen weiter ausbauen und standardisieren.“Andreas Mahr, Department Leader Robotic bei Harro Höfliger
Auf die zwei Jahre seit Gründung der Abteilung blickt Mahr zufrieden zurück: „Das Know-how rund um Robotik konnten wir bereits bei vielfältigen Projekten einbringen. Um unseren Kunden eine noch höhere Flexibilität bei Herstellprozessen garantieren zu können, wollen wir die Roboteranwendungen bei Harro Höfliger in Zukunft weiter ausbauen und standardisieren.“
Ablauf der Roboter-Integration bei Maschinen
1. Definition des Robotersystems
Auf Basis von Parametern wie Reichweite, Traglast, Umgebung und Hersteller legt das Team zunächst die geeigneten Robotersysteme fest.
2. CAD-Integration
Im nächsten Schritt integrieren die Experten die CAD-Umgebung in die Hersteller-Software.
3. Programmieren der Software
Elementare Aufgaben sind auch das Schreiben der Software, die Anordnung der Zelle und die Prüfung, dass alles den Systemanforderungen entspricht.
4. Inbetriebnahme
Nach dem Programmieren der Steuerung (SPS) wird die Roboterapplikation in die Maschinenumgebung eingebettet.
Diesen Artikel als PDF-Datei herunterladen
Fotos: Helmar Lünig