Nowadays, process automation is hardly conceivable without the flexible grasping and handling of parts by robots. Harro Höfliger has also been increasingly using such systems in their machines for years. “Robots not only result in a higher degree of efficiency and more flexible processes, they generally also reduce costs,” explains Andreas Mahr, Department Leader Robotics. Since fall 2018, a separate, interdisciplinary Robotics Department has been responsible for the project planning, implementation and management of robot applications.
Preliminary tests performed by Engineering & Innovation Services (EIS) and a closely interlinked cooperation with Mechanical Design are also a standard element of the process. Customers benefit from this in-house expertise and appreciate having a single contact and service partner for the robot technology in their system.
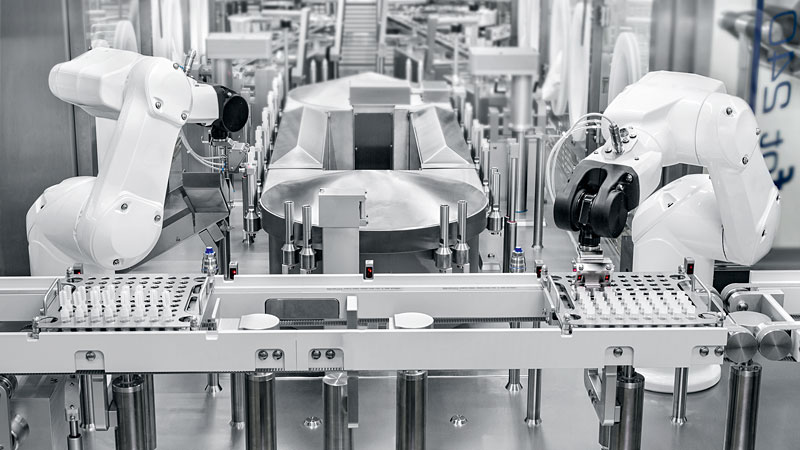
Robot applications at Harro Höfliger usually specialize in pick & place applications.

Thanks to the interdisciplinary and mechatronic approach, the robotics team consisting of eight people is linked to many other departments. Crucial points are discussed with the mechanical design department already in the early concept phase of a machine.
Multifaceted tasks
The team of eight conducts risk assessments already during the initial stages. “We are involved in the project as early as the concept phase. Right from the start, process and machine safety and reliability are paramount,” emphasizes Mahr. The team not only determines the configuration of the robot stations, but also their distance to the protective housing. The ideal robot system is chosen on the basis of parameters such as operating range, payload and environment.
In the next step, the group integrates the CAD environment into the manufacturer’s software and compares the software with the system requirements – this primarily refers to the cycle time. Prior to the final start-up of the robots, the team is in close contact with the Control Engineering Department in order to program the machine control system (PLC) and embed the robot application into the machine environment.
When it comes to more complex processes, it is sometimes even necessary to start up the system virtually. That way, the combination of machine and robot control can be sufficiently validated at an early stage and potential problems recognized and solved in time.
“Robots result in a higher degree of efficiency and more flexible processes.”Andreas Mahr, Department Leader Robotics at Harro Höfliger
Regarding technology, the group has focused on three kinematics: First, SCARA robots, whose structure consists of four axes. A second option is the Delta Picker: These parallel arm robots are particularly light and have at least three arms. The arm is mounted at the ceiling and is designed for X, Y and Z motion paths and high-speed applications. Vertical parts, on the other hand, can only be grasped with a 6‑axis robot due to its degrees of freedom – this third option is often used for oval motion machines. “In principle, every robotics automation project includes customer-specific developments, which usually involve the grasping and handling of parts, so-called pick & place applications,” explains Mahr.
Maximum application versatility
Most of the sophisticated robots integrated into Harro Höfliger’s systems are designed to handle delicate and light products such as syringes, pens or wound dressings. Robots are the first choice particularly for use in aseptic production environments where there are high demands on sterile handling. In addition to pick & place applications, they can also perform very specific process tasks such as for example cutting open pouches, applying adhesives, emptying transport containers or erecting a folding carton.
“We intend to further expand and standardize robot applications in the future.“Andreas Mahr, Department Leader Robotics at Harro Höfliger
Mahr looks back with satisfaction on the two years since the department was founded: “We have already been able to apply our expertise in robotics to a wide range of projects. In order to be able to guarantee our customers even greater flexibility in manufacturing processes, we intend to further expand and standardize robot applications at Harro Höfliger in the future.”
How to integrate robots in machines

1. Robot system definition
Based on parameters such as operating range, payload, environment and manufacturer, as a first step the team determines a suitable robot system.
2. CAD integration
In the next step, the experts integrate the CAD environment into the manufacturer’s software.
3. Software programming
Fundamental tasks also include software installation, cell arrangement and a compliance check with the system requirements.
4. Commissioning
Following the programming of the controller (PLC), the robot application is embedded into the machine environment.
Download this article as PDF file
Photos: Helmar Lünig